
作为中国南方最具规模的先进制造技术与高端装备展览会,2022年深圳国际工业制造技术及设备展览会 ITES于8月15日举办,旨在为全球工业市场的技术进步、商贸合作与产业发展提供坚实力量。
在众多品牌的展示下,机器人在线带领大家直击现场,详细了解各家为我们带来的多种产品!
法奥意威
法奥意威分别从工业场景运用案例和服务型场景运用案例上展示产品:
协作机器人焊接小车
法奥意威焊接小车被誉为“高效的行走焊接工”,焊接工艺包内的摇摆焊、断焊、多层多道焊等多种工艺,可以满足直线、圆形、外部轴联动焊接、激光传感器引导焊接等多种实际需求。相较传统的工业机器人,可以快速使用。
艾灸机器人
艾灸机器人的雀啄灸、回旋灸、往复灸等多种技法,能根据不同体质实现差异化疗效。在防烫伤方面,通过红外测距,温度传感的双重设置,保证安全。在艾灸烟灰回收方面,设置有集烟、集灰装置,改善了以往艾灸过程中常见的烟尘吸入等问题。
精谷智能
机器人全自动三维光学扫描测量系统

精谷的高精度多轴机器人马克斯曼Marksman,凭借±0.01mm重复定位精度高,集成布置费用低这两大优势并基于结构光原理的双目视觉或者激光三角法的跟踪扫描,在达到计量级测量精度的同时,能大幅提升物件复杂三维外形尺寸的测量品质和检测效率。
精谷高精度机器人marksman

具有3-10kg全程负载能力。采用25位光电式双编码器和3组双轴承系结构,有效抑制了运行中的抖动偏差,保障机器人的精度性和稳定性。整机重复定位精度最高可达 ±0.003mm水平。机器人可以根据需要配备视觉感知、力感知、自主避障、自主路径规划、自主能耗评估、AR交互、APP示教能力,更加安全且更加智能。采用模块化的技术路径,机器人维护保养简便快捷。
因时机器人
微型伺服电缸

产品介绍:因时机器人的微型伺服电缸是一种小型一体化直线伺服系统,是机器人、医疗器械、工业设备等精密机电设备的核心运动部件。其内部集成了空心杯电机、精密行星减速器、传感器、精密螺杆机构及闭环控制系统,具有体积小、精度高、负载大等技术特点,可以实现行程范围内任意位置精确伺服控制。内置绝对位置传感器,断电后不会丢失位置信息,无需找零位。
优势:驱控一体化设计、体积小、精度高、功率密度大、力控制(力控型号)。
仿人五指灵巧手
仿人五指灵巧手大小与人手相当,单手仅530g,6个自由度,12个运动关节,五指可灵活快速运动,结合力位混合控制算法,实现与人类的安全交互以及精准抓握!适用人形机器人、协作机器人、医疗机器人、特种机器人及假肢等。
壹悟科技
星罗自动化工厂解决方案成熟应用在工业场景与智能仓储场景中柔性物流自动化解决方案中。

星罗自动化工厂解决方案具有高度灵活性和可配置性,通过可视化的流程编排引擎,可实现对各种工厂搬运流程的任务配置。
系统下游通过机器人调度系统RCS对接并调度多品牌、多接口、多导航方式的机器人和自动化设备,设备协同作业相互配合,大幅提升工厂作业效率和空间利用率,高效完成工厂自动化作业任务。
华成工控
推出了最新一代车床机械手控制系统产品QC-L3G

QC-L3G产品在硬件、软件等方面均进行了结构的改进,配置了手控器、驱控一体机、伺服电机、编码器线、动力线、制动电阻、挂钩、蜂鸣器、开关电源、说明书等,具有集成度高、响应快速、安装方便、抗干扰强、性价比高等特点。
QC-L3G还附带有工艺逻辑与点位信息分离、单双头阀配置、车床一拖一、车床一拖二、改字工具、MODBUS通信等功能、组件。
知行机器人
知行自适应机器人手及基于“AI+3D视觉的智能抓取系统,广泛应用于职业教育、工业制造、仓储物流、生命科学、新零售、航空航天等领域。”
自主研发的机器手可进行精确位置和力控制,具有感知和反馈功能,解决机器人应用成本高、柔性差、操作复杂等问题。
迦智科技
轻量级智能无人叉车FOLA系列

BN2001D 托盘搬运式无人叉车,体积小,自重轻,最大额定载荷2000kg,叉齿举升高度120mm,360度原地旋转,适用于空间有限的车间、厂房作业需要,实现川字型托盘物料的自动化水平搬运。

DN1416 托盘堆高式无人叉车,额定载荷1400kg,举升高度1600mm,满载时运行速度可达1.35m/s,完成川字型托盘物料的自动堆高、装卸、上下料;车身的多重安全防护机制,保障了人、车和货物安全。
配天机器人
超高速桌面型机器人AIR12-940、AIR10-1210

两款最新的超高速桌面型机器人AIR12-940、AIR10-1210,以其优越的性能和精巧的设计成为了此次展会最大的亮点。同时配天机器人也带来了众多应用方向的技术方案,其中包括多机联动汽车尾气管焊接、多层多道焊接+激光跟踪、机器人飞拍展示;自动验布机现场缺陷检测、LED分光机快速定位、高跟随性贴标机、移动展示台及伺服系统全系列方案展示。
ATI工业自动化
ATI展示了ATI全自动工作站、力控装配工作站、打磨抛光工作站、TM打磨工作站。

ATI全自动工作站使用 KUKA KR60 机器人搭载ATI的机器人工具快换装置实现不同的末端材料去除工具切换,对水表金属外壳进行去毛刺应用。
UR 机器人材料去除工作站采用AOV-10轴向浮动偏心振动砂光机搭载UR的协作机器人,对木质吉外壳进行打磨抛光,AOV-10本身具有易用性和多功能性,它可以提供比较大的浮动范围,也可以对其进行调整以适应不同的工件表面需求,帮助企业解决生产需求。
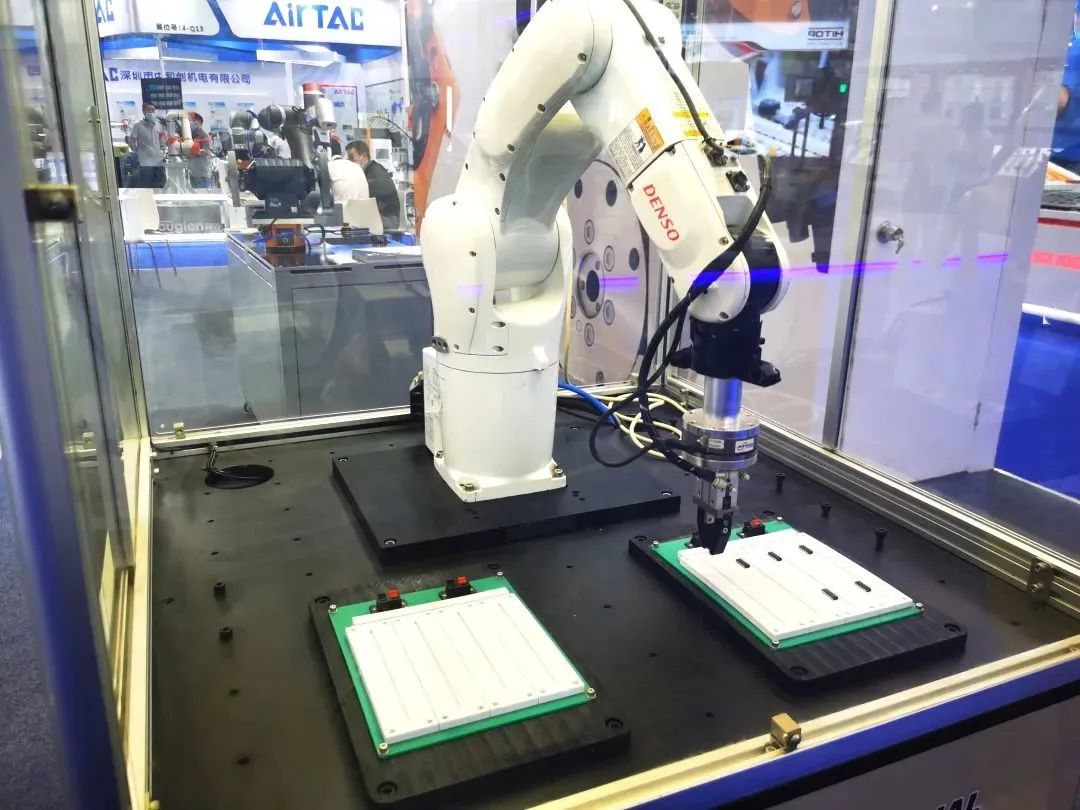

DENSO力控装配工作站使用电装 VS060 系列机器人并在法兰前端配合使用 ATI 力控传感器进行芯片安装功能演示。
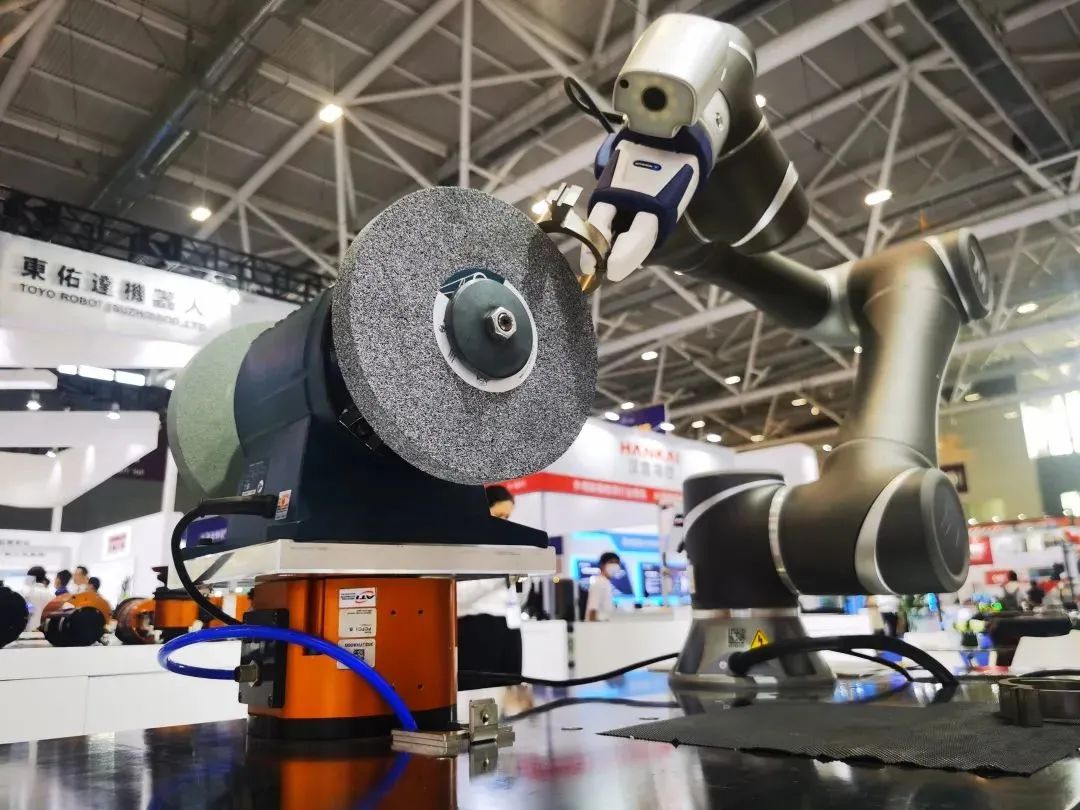
TM打磨工作站轴向浮动力控装置搭载TM的协作机器人,PCFC是一个多用途的浮动装置,本次演示效果为PCFC和砂轮机的组合,为的是给砂轮机提供浮动,通过机器人抓取工件的形式实现自动柔性打磨的过程。
艾利特
力控打磨

功能说明:
工站主要由艾利特EC66协作机器人结合凝智的力控工艺包,使用了Onrobot打磨工具。整个应用的核心是艾利特机器人的稳定轨迹和凝智的力控工艺包。
动作说明:
1、通过示教的打磨轨迹,引导机器人完成工件打磨工作;
2、在整个轨迹过程中,凝智的力控系统通过传感器和机器人位置反馈,不断给艾利特机器人发送实时位置信息,来保持在整个轨迹中工具能以一个恒定的力量施加给打磨物体。
大扭矩拧紧

功能说明:
艾利特EC612协作机器人搭载Desoutter拧紧系统,完成发动机的拧紧过程。该工站模拟展示发动机、变速箱等较大扭矩拧紧工艺,基于艾利特协作机器人的快速布局和安全特性进行的产线自动化升级,可以实现柔性且低成本的自动化方案。
动作说明:
1. EC612移动到拧紧螺钉点位;
2. 拧紧枪动作,拧紧螺钉;
3. 拧紧枪反转,松开螺钉(为循环演示操作);
4. 重复以上动作。
